| 徳島大学シーズ<E-02>:機械 | |
空気圧アクチュエータの高精度位置決め制御技術
― 協働ロボットへの適用で接触時の安全性担保とナノメートルオーダーの精密作業を両立 ―
| 髙岩 昌弘 | 教授 | 大学院社会産業理工学研究部 理工学域 機械科学系 知能機械学分野 |
| キーワード | 空気圧アクチュエータ、精密位置決め制御、協働ロボット、 産業応用 |
|
| 研究室URL | http://pub2.db.tokushima-u.ac.jp/ERD/person/292956/profile-ja.html | |
| 研究の概要 | |||
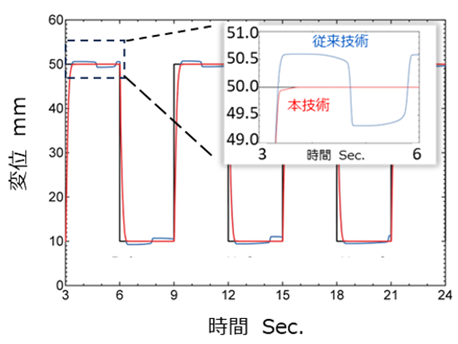
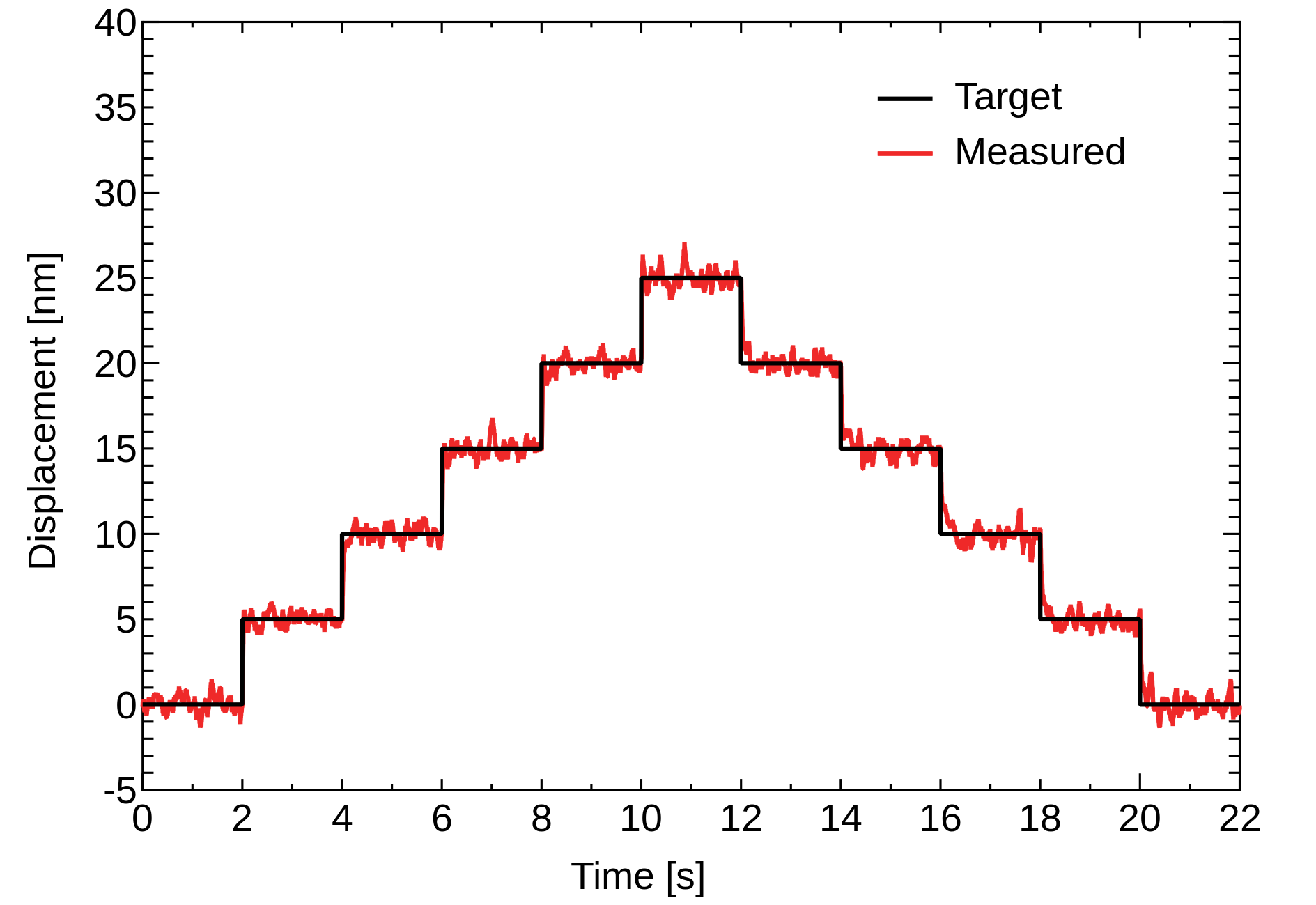
| <ロボット等の精密作業用途への展開には、任意の高精度位置決め制御がボトルネック> 空気圧アクチュエータは高出力/重量比や高速稼動の特性を活かして食品、自動車業界などの生産現場で主に終端での位置決めによるワーク移動の制御機器として用いられている。一方で、空気圧アクチュエータは空気の弾性と停止・移動時の摩擦係数の非線形性といった課題により任意の位置決め制御は困難とされ、精密位置決めが要求されるロボット等の産業用途への展開は限定的な状況といえる(図1)。 <技術課題:「空気の弾性」、「摩擦係数の非線形性」を回避する新たな位置決め制御技術の提案> 本研究では、位置偏差の時間積分に基づく従来法と異なり、位置偏差の状態に着目した制御手法による高精度位置決め技術を提案している。これにより精密位置決めの障壁であったスティック・スリップ現象を抑制し、その結果、汎用空気圧アクチュエータで、直動式:±5ナノメートル(図2、3)、回転式:±1/10,000度未満の位置決め精度を実現している。 |
|||
| 想定される用途と製品化・事業化イメージ | |||
|
<空気圧制御の本質的特長:高出力/重量や高速稼動を活かしロボット等の高荷重・精密作業分野への展開>
|

| 特許 | ● 特許出願中 | ||
最終更新日:2026年3月25日
| 簡易なお問合せ | 技術相談 | 学術指導制度 | 共同・受託研究 |
